
Nader bekeken: V2X Communicatie tussen voertuigen
Autonoom rijden
Mobiliteit in de nabije toekomst
De holy grail, waaraan met name autofabrikanten werken, is natuurlijk autonoom rijden. Dat moet het verkeer een stuk veiliger maken. Wereldwijd vallen er 1,3 miljoen doden in het verkeer, waarvan 25.000 in Europa. Daarmee is het verkeer eigenlijk nog altijd bijzonder veilig, de kans om ergens in je leven in het verkeer te overlijden is kleiner dan 1%. Maar de impact is altijd groot. Het overkomt vaak jonge mensen en het afscheid is altijd plotseling. Reden om er dus toch wat aan te doen. Bijvoorbeeld door de zwakste schakel in het verkeer – de mens - uit te schakelen of tegen zichzelf te beschermen. Daarnaast is er met de huidige verkeersdrukte en met de CO2-problematiek een noodzaak het verkeer zo efficiënt mogelijk te stroomlijnen en dat kan met een verregaande automatisering. Bovendien zijn er sociale issues: er komen steeds meer oude mensen,

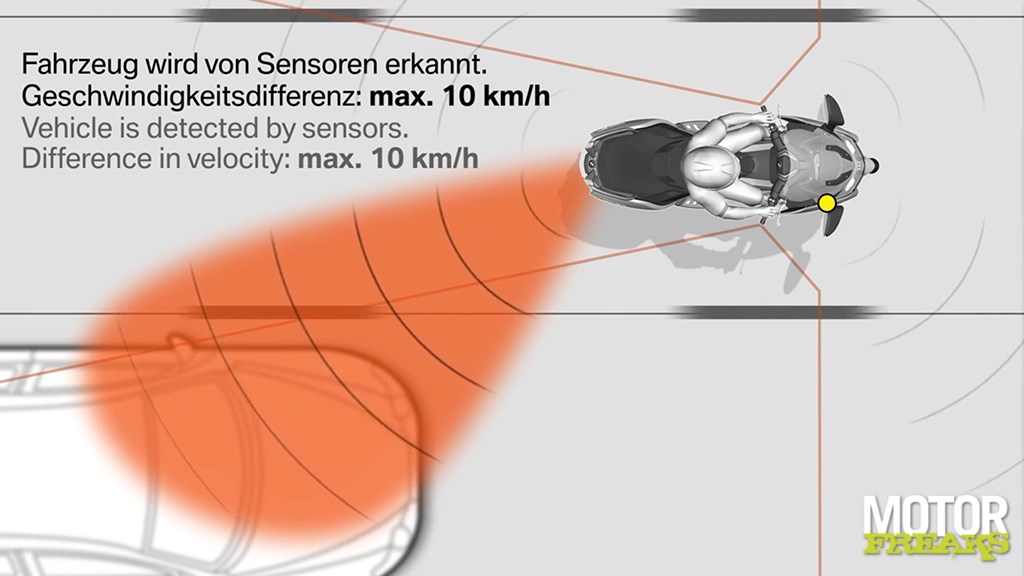
BMW Side View Assist werd in 2016 geïntroduceerd op de nieuwe C650 GT
 die niet meer in staat zijn zelf auto te rijden. Die kunnen met zelfrijdende auto’s weer mobiel worden. En er zijn andere uitdagingen: in een wereld waarin niet iedereen meer over een eigen auto kan of wil beschikken kunnen zelfrijdende auto’s een bijdrage aan car-share-diensten of taxidiensten leveren. De kosten per kilometer zijn te halveren als er geen chauffeur nodig is. Belangrijk, want de markt voor mobiliteit is vijf tot tienmaal zo groot als de markt voor auto’s. En wat denk je van vrachtverkeer zonder chauffeur of rijtijdenbesluit?
die niet meer in staat zijn zelf auto te rijden. Die kunnen met zelfrijdende auto’s weer mobiel worden. En er zijn andere uitdagingen: in een wereld waarin niet iedereen meer over een eigen auto kan of wil beschikken kunnen zelfrijdende auto’s een bijdrage aan car-share-diensten of taxidiensten leveren. De kosten per kilometer zijn te halveren als er geen chauffeur nodig is. Belangrijk, want de markt voor mobiliteit is vijf tot tienmaal zo groot als de markt voor auto’s. En wat denk je van vrachtverkeer zonder chauffeur of rijtijdenbesluit?
Plaatsbepaling
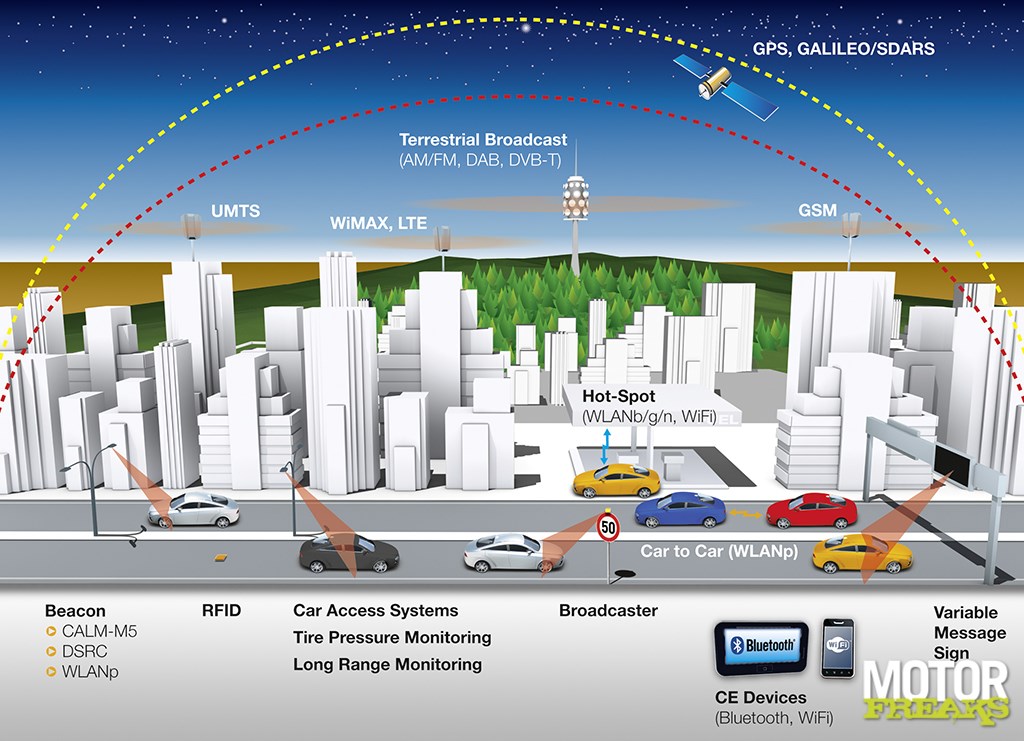
Bij autonoom rijden speelt de plaatsbepaling van het voertuig een belangrijke rol. De nauwkeurigheid van GPS-sensoren en het kaartmateriaal zijn daarbij cruciaal. De huidige kaarten zijn echter niet nauwkeurig genoeg, bovendien moeten de kaarten absoluut up-to-date zijn. Dat betekent in feite dat je niet meer kunt werken met kaartmateriaal dat in het geheugen van het navigatiesysteem wordt opgeslagen, want dat is morgen al verouderd. Het kaartmateriaal moet doorlopend worden aangepast en real-time worden gedownload. Daarvoor moet een nieuwe, snelle communicatiestandaard worden ontwikkeld. Waarschijnlijk wordt dit 5G. Voor het verbeteren van het kaartmateriaal worden de sensoren en camera's van de auto zelf gebruikt. Die nemen de straten waar en geven die data door aan de centrale, die het kaartmateriaal bijwerkt. Dat doet bijvoorbeeld TomTom. Die maakt gebruik van Sensor Derived Observations van connected cars en van LIDAR-data, om een high definition 3D-beeld van de omgeving te maken. Verder worden GPS-data gebruikt om verkeersdrukte te monitoren en routeberekeningen daarop aan toepassen. Die gegevens zijn afkomstig van mobile apps, connected vehicles en persoonlijke navigatieapparaten van consumenten.
Waar staan we nu?

Nu nog met behoorlijk wat sensoren en camera's op het dak, in de toekomst alles in de auto of motor geïntegreerd
Hoe ver zijn we verwijderd van de zelfrijdende auto? Niet zo heel ver. De BMW 7-serie en de nieuwe Lexus LS hebben al een vergaande besturingsondersteuning, terwijl ook standaard Toyota’s al veel geautomatiseerde functies hebben. Toyota Safety Sense wordt nu al op 92% van de Toyota range toegepast. Het systeem bevat bijvoorbeeld een Pre Collision system. Hierbij gebruikt de auto een naar voren gerichte radar en een optische camera om de ruimte voor de auto te scannen. De auto waarschuwt met geluids- en beeldsignalen als er een obstakel is waarvoor geremd moet worden. Doet de rijder dat niet, dan remt de auto zelf. Het tweede systeem is Dymamic Radar Cruise Control (DRCC). Dit is een adaptieve cruise control, die de afstand tot de voorganger met behulp van een radarcamera gelijk houdt. Dan is er nog een automatic High Beam systeem, dat grootlicht aanzet als het kan en weer uitzet als er tegenliggers zijn. Ook dit systeem werkt met een

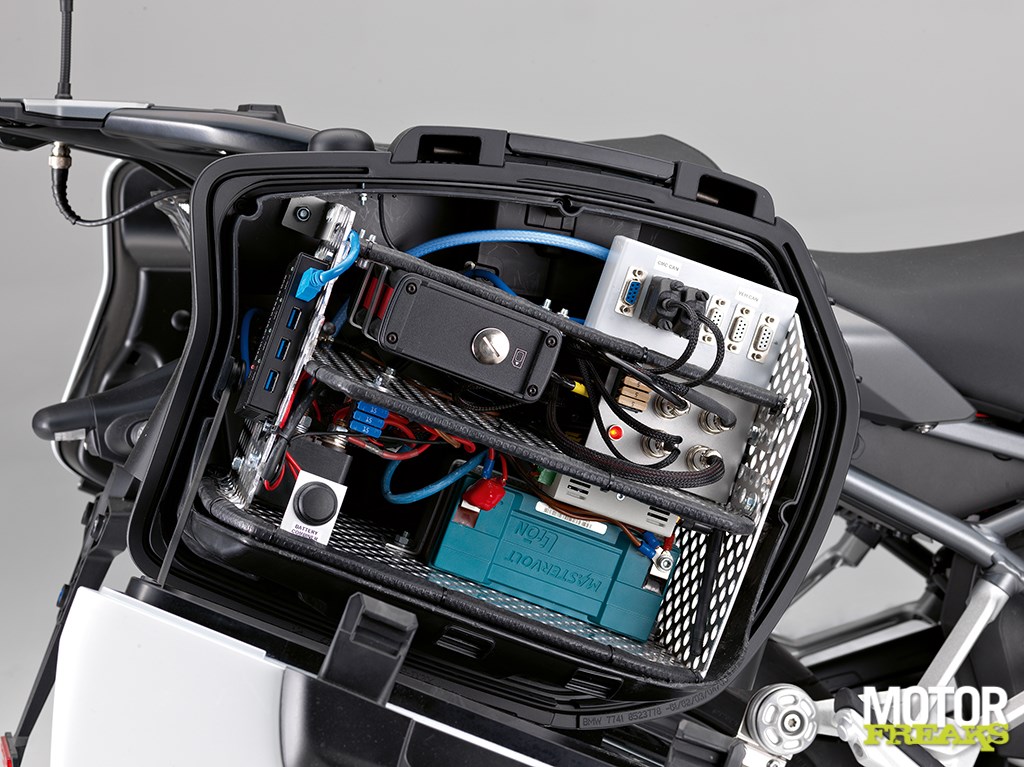
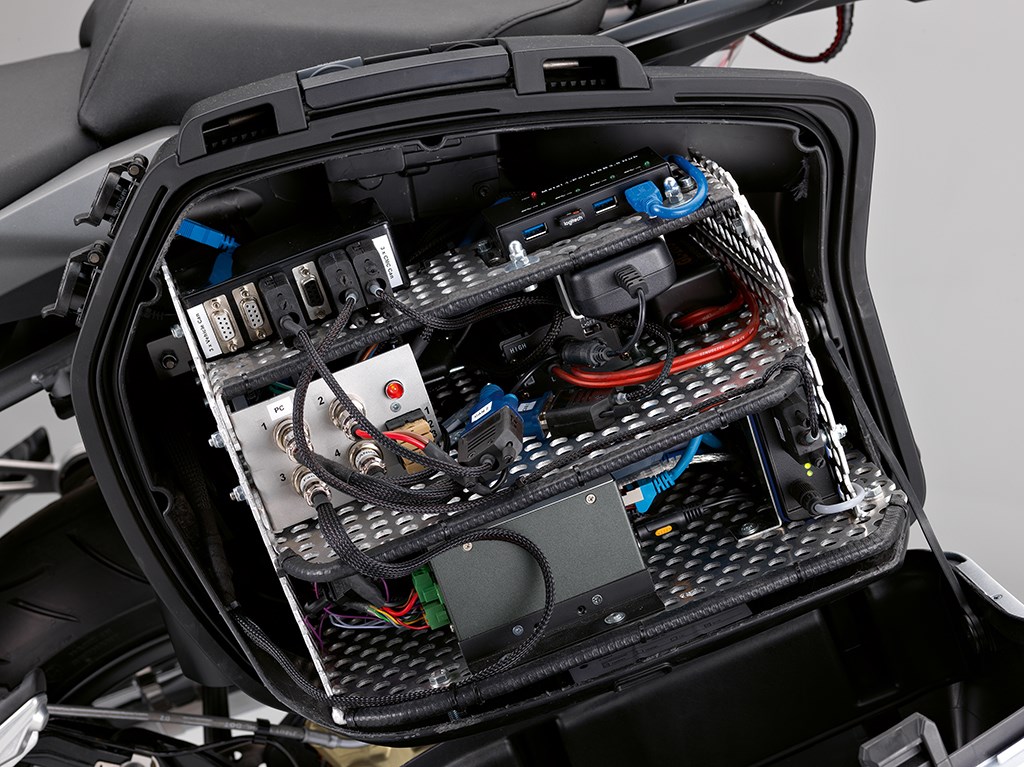
Bij de recent door BMW gepresenteerde ConnectedRide is alle elektronica in de twee koffers ondergebracht. Dat zal naar de toekomst gezien veel compacter moeten worden
 voorwaartsgerichte optische camera. Tenslotte is er nog een Road Sign assist, dat verkeersborden leest en weergeeft en een Lane Departure Alert. Dit systeem gebruikt een optische camera om zichtbare wegmarkeringen te lezen en waarschuwt met een geluidssignaal en een optisch signaal als je de rijbaan dreigt te verlaten zonder dat je richting aangeeft. Praktijkervaringen met de Prius met dit systeem bewijzen al dat er 90% minder frontale aanrijdingen en 70% minder van de zijkant plaatsvinden.
voorwaartsgerichte optische camera. Tenslotte is er nog een Road Sign assist, dat verkeersborden leest en weergeeft en een Lane Departure Alert. Dit systeem gebruikt een optische camera om zichtbare wegmarkeringen te lezen en waarschuwt met een geluidssignaal en een optisch signaal als je de rijbaan dreigt te verlaten zonder dat je richting aangeeft. Praktijkervaringen met de Prius met dit systeem bewijzen al dat er 90% minder frontale aanrijdingen en 70% minder van de zijkant plaatsvinden.
Highway Team Mate
De nieuwe Lexus LS is uitgerust met een Safety System +A-systeem. Dit vult het Toyota Safety Sense systeem aan met een Lane Trace Assist, die de auto actief op de rijbaan tussen de wegmarkering houdt, een pre-crash safety, dat niet alleen remt voor obstakels, maar eventueel ook uitwijkt wanneer daar ruimte voor is, en een Parking Support Brake, die bij het achteruitrijden remt wanneer er bijvoorbeeld kinderen achter de auto spelen. Met deze uitbereiding dekt het Lexus Safety System + A bijna de helft van de oorzaken van fatale ongelukken af. Die ratio zal nog verbeteren als daar in 2020 de “Higway Teammate” aan wordt toegevoegd, met onder meer een inhaalfunctie, die ook van rijbaan kan veranderen. Dit systeem maakt onder meer gebruik van Lidar (Laser Imaging Detaction and Ranging), radar (Radio Detaction and Ranging), optische camera’s, Sonar (Sound navigation and Ranging), GPS en een Inertie-meetunit, die de acceleraties en  Bosch heeft al veel sensoren en camerasystemen ontwikkeldrotaties van de auto in alle richtingen en over alle assen meet. Daarbij wordt gebruik gemaakt van “deep learning”, waarbij het systeem zich aanpast aan het gedrag van de rijder en aan de verkeersomgeving. Een paar jaar na de Higway Teammate zal ook een Urban Teammate worden geïntroduceerd, die de auto in de stad geautomatiseerde functies verricht.
Bosch heeft al veel sensoren en camerasystemen ontwikkeldrotaties van de auto in alle richtingen en over alle assen meet. Daarbij wordt gebruik gemaakt van “deep learning”, waarbij het systeem zich aanpast aan het gedrag van de rijder en aan de verkeersomgeving. Een paar jaar na de Higway Teammate zal ook een Urban Teammate worden geïntroduceerd, die de auto in de stad geautomatiseerde functies verricht.
Menselijk gedrag
Voordat volledig autonoom rijden mogelijk wordt, moet er nogal wat veranderen. Zo moeten de auto’s aan internationale standaards en wetten voldoen, of de verouderde wetten moeten worden aangepast worden aan de moderne mogelijkheden. Ook de controle van al die gegevens die van en naar de voertuigen gaat moet optimaal zijn, want je moet zeker weten dat het voertuig de juiste informatie krijgt. Als je auto of motor een signaal ontvangt dat het stoplicht op groen staat, zal het ook echt op groen moeten staan. Een andere uitdaging is het herkennen van stilstaande en bewegende objecten. Uit de beelden die alle camera’s en sensoren rond het voertuig waarnemen moet de auto de vrije ruimte kunnen berekenen en voorspellen, zodat het voertuig real time een full scene overzicht krijgt waarmee hij proactief en defensief kan rijden. De beelden moeten

Realtime situaties inschatten vergt inventieve software
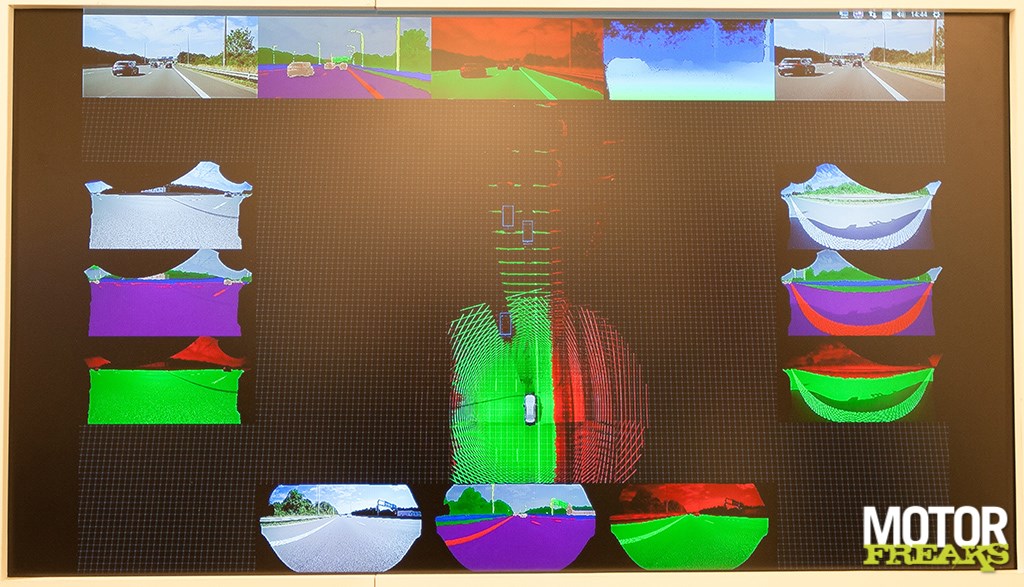
Het beeld dat de camera's detecteren
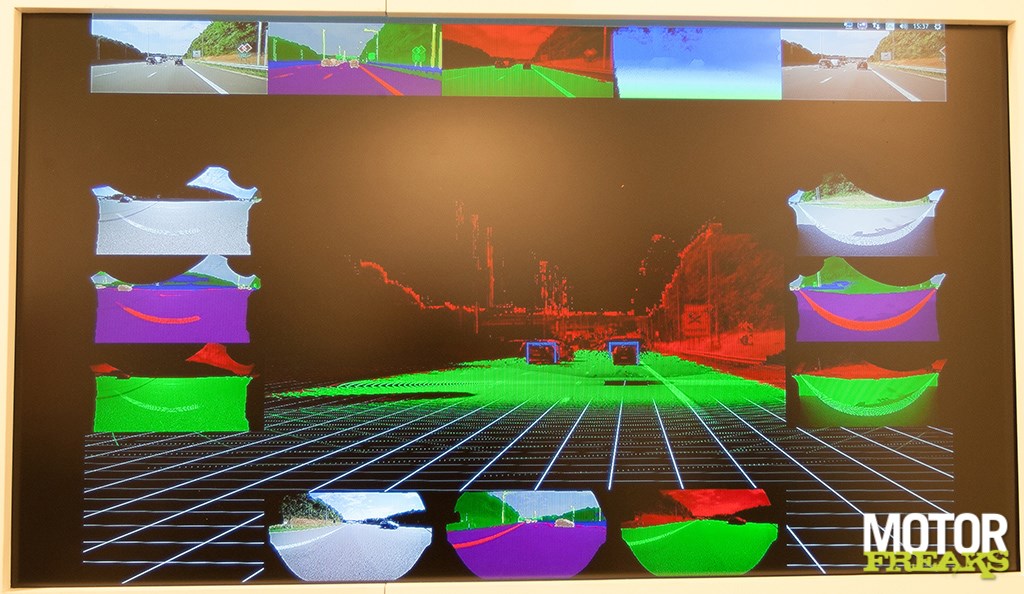
En het beeld dat daaruit wordt gegenereerd
worden gecombineerd en geanalyseerd, zodat je kunt zien wat tot de infrastructuur behoort, wat auto’s, mensen en voetgangers zijn en hoe die zich bewegen. En dat is weer een volgende uitdaging: het voorspellen van menselijk gedrag. Mensen kunnen dat erg goed. We gebruiken daarvoor empathie. We bepalen wat we doen naar aanleiding van wat we denken dat een ander gaat doen. Dat is voor een computer echter enorm lastig. Software schrijven die rekening houdt met alle verkeersregels is al een klus, maar dan moet die software ook nog rekening houden met mensen die zich er niet aan houden.
Failsafe
Een andere grote zorg van autonoom rijden is de betrouwbaarheid van de systemen zelf. We weten allemaal dat computers weleens vastlopen en ook het hacken van systemen is een duidelijk risico. Om dat veilig te stellen is de ISO 626.2 ontwikkeld. Waar die norm op neerkomt, is dat het risico is afgeleid uit het levensrisico. Wanneer je in een autonoom rijdende auto zit, mag dit het levensrisico niet verhogen. Computersystemen mogen maximaal 10-8 seconde uitvallen. Dat is op zich niet zo'n probleem, de computersystemen zijn in basis vrij eenvoudig. Wat moeilijk is, is het vaststellen van de grenzen en de betrouwbaarheid van sensoren. Er worden veel sensoren gebruikt en die bewaken elkaar. Als twee van de drie sensoren aanwezig zijn, dan kun je nog rijden. En dan is het de vraag of je een autonoom rijdende auto tegen hackers kunt beschermen. Een concurrent, die jouw taxibedrijf wil dwarsbomen, terroristen die je willen laten crashen of lolbroeken, die het doen omdat het kan. Je kunt beveiligingen en firewalls opwerpen, maar het blijft altijd een kippenrace, criminelen worden steeds slimmer en fabrikanten moeten ze steeds weer voor zijn.
